A BLDC (Brushless DC) motorok, azaz kefe nélküli egyenáramú motorok térhódítása napjainkban egyértelműen megfigyelhető. Ennek oka elsősorban a hagyományos, kefés egyenáramú motorokkal szembeni számos előnyükben rejlik. Ezek az előnyök nem csupán a nagyobb hatásfokot és a hosszabb élettartamot foglalják magukba, hanem a kisebb karbantartási igényt és a jobb irányíthatóságot is.
A kefés motorokhoz képest a BLDC motoroknál a kommutáció elektronikus úton valósul meg, ami kiküszöböli a mechanikus kopást és a szikrázást. Ezáltal a BLDC motorok sokkal megbízhatóbbak és alkalmasabbak az olyan alkalmazásokra, ahol a folyamatos és zavartalan működés elengedhetetlen.
A BLDC motorok elterjedése elsősorban a teljesítményelektronika fejlődésének köszönhető, mely lehetővé tette a hatékony és precíz elektronikus kommutációt, ezáltal a motorok teljesítményének optimalizálását különböző terhelési körülmények között.
A korábbi magasabb költségek ellenére, a technológia fejlődésével és a tömeggyártással a BLDC motorok ára jelentősen csökkent, ami tovább növelte versenyképességüket. Ennek eredményeképpen a BLDC motorok ma már számos területen megtalálhatóak, a háztartási gépektől kezdve az ipari robotokig, az elektromos járművektől a repülőgépekig.
Az alábbiakban részletesen bemutatjuk a BLDC motorok működési elveit, a felépítésüket, az irányítási módszereket és a legfontosabb alkalmazási területeket, rávilágítva arra, hogy miért váltak a modern technológia nélkülözhetetlen elemeivé.
A BLDC motor felépítése: Állórész és forgórész
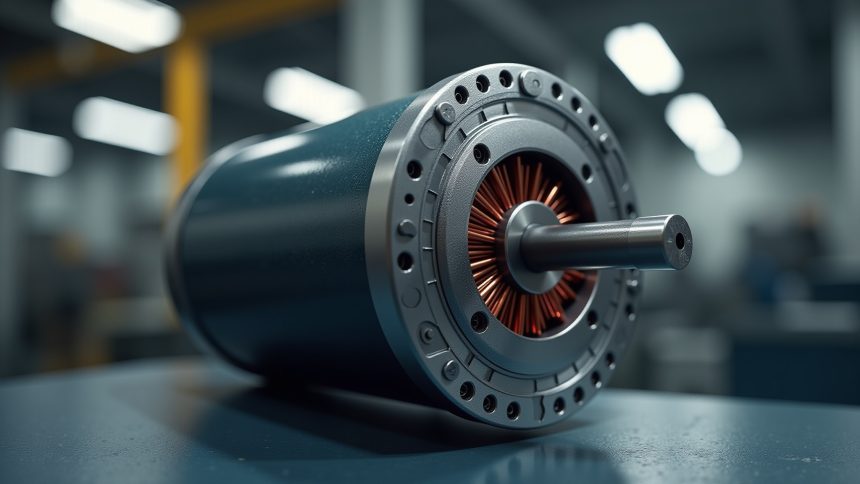
A BLDC motor, azaz a kefe nélküli egyenáramú motor felépítése alapvetően két fő részből áll: az állórészből (stator) és a forgórészből (rotor). Ezek elrendezése és kialakítása kulcsfontosságú a motor működése szempontjából.
Az állórész a motor rögzített része, mely általában tekercseket tartalmaz. Ezek a tekercsek, melyeket gyakran „fázisoknak” is neveznek, elektromágneses teret hoznak létre, amikor áram folyik át rajtuk. A tekercsek elrendezése és a fázisok száma befolyásolja a motor nyomatékát és sebességét. A legtöbb BLDC motor háromfázisú állórésszel rendelkezik, ami simább nyomatékeloszlást tesz lehetővé.
Ezzel szemben a forgórész a motor forgó része, mely mágneseket tartalmaz. Ezek a mágnesek lehetnek állandó mágnesek (általában neodímium mágnesek a nagy teljesítmény miatt) vagy elektromágnesek. Az állandó mágnesek használata egyszerűbb és megbízhatóbb megoldást kínál, mivel nincs szükség külön áramellátásra a mágneses mező létrehozásához a forgórészen. A mágnesek polaritása (észak és dél) meghatározza a motor forgásirányát és a nyomatékot.
A BLDC motor lényege, hogy az állórész tekercseinek gerjesztésével létrehozott mágneses tér „vonzza” vagy „taszítja” a forgórész mágneses pólusait, ezáltal hozva létre a forgó mozgást.
A forgórész mágneses pólusainak elrendezése és száma szintén fontos tényező. Minél több pólus van a forgórészen, annál nagyobb a motor nyomatéka alacsony sebességnél. Azonban a pólusok számának növelése korlátozhatja a motor maximális sebességét.
Továbbiak a témában

Fontos megjegyezni, hogy a BLDC motor vezérléséhez szenzorok (pl. Hall-érzékelők) szükségesek, melyek a forgórész helyzetét érzékelik, és ennek megfelelően vezérlik az állórész tekercseinek gerjesztését. Ez a szenzoros visszacsatolás teszi lehetővé a motor hatékony és pontos vezérlését.
A BLDC motor működési elve: Kommutáció és mágneses tér
A BLDC motor (kefe nélküli egyenáramú motor) működése alapvetően a elektronikus kommutáción és a forgó mágneses téren alapul. Eltérően a hagyományos egyenáramú motoroktól, ahol a kommutációt kefék végzik a kommutátoron, a BLDC motorokban ezt a funkciót elektronikus áramkörök, általában tranzisztorok vagy MOSFET-ek látják el.
A motor állórészében tekercsek helyezkednek el, a forgórész pedig permanens mágneseket tartalmaz. A tekercsekben áramot átfolyatva mágneses teret hozunk létre. Az elektronikus vezérlő (általában egy mikrovezérlő) folyamatosan figyeli a forgórész helyzetét (általában Hall-érzékelők segítségével), és ennek megfelelően kapcsolja be, illetve ki a tekercseket, létrehozva ezzel egy forgó mágneses teret.
A BLDC motor lényege, hogy az állórész tekercseinek áramirányát a forgórész pozíciójának megfelelően váltogatjuk, így a forgórész permanens mágneses tere mindig a lehető legnagyobb nyomatékot kifejtve tudja követni az állórész által generált forgó mágneses teret.
Ez a folyamat, a kommutáció, biztosítja, hogy a forgórész folyamatosan forogjon. A vezérlő algoritmusok különböző stratégiákat alkalmazhatnak a kommutációra, például a hatlépéses kommutációt, amely egyszerű és elterjedt, vagy a bonyolultabb, szinuszos vezérlést, amely simább működést és alacsonyabb zajszintet eredményez.
A forgórész pozíciójának pontos ismerete kulcsfontosságú a hatékony kommutációhoz. A Hall-érzékelők által szolgáltatott információk alapján a vezérlő pontosan tudja, melyik tekercset kell bekapcsolni, és melyiket kikapcsolni a maximális nyomaték elérése érdekében. A helyzetérzékelés nélküli (sensorless) BLDC motorok léteznek, amelyek a tekercsekben indukált feszültséget (back EMF) használják a forgórész pozíciójának becslésére, de ezek általában bonyolultabb vezérlést igényelnek.
A mágneses tér erőssége és a tekercsek áramának nagysága közvetlenül befolyásolja a motor nyomatékát és sebességét. A vezérlő az áram szabályozásával képes a motor nyomatékát és sebességét pontosan beállítani, ami lehetővé teszi a BLDC motorok széleskörű alkalmazását a különböző ipari és fogyasztói alkalmazásokban.
A BLDC motor kommutációs módszerei: Szenzoros és szenzor nélküli vezérlés
A BLDC motorok hatékony és precíz működésének kulcsa a megfelelő kommutáció. A kommutáció lényegében a tekercsek áramirányának helyes időzítése, ami a forgórész pozíciójának függvénye. Két fő módszer létezik a kommutáció megvalósítására: a szenzoros és a szenzor nélküli vezérlés.
Szenzoros vezérlés esetén a forgórész pozícióját speciális szenzorok (általában Hall-érzékelők) mérik. Ezek a szenzorok a motor belsejében helyezkednek el, és a mágneses mező változásait érzékelve pontos információt szolgáltatnak a forgórész helyzetéről. A vezérlő elektronika ezután a szenzorok jelei alapján kapcsolja a megfelelő tekercseket, biztosítva a folyamatos forgást. A szenzoros vezérlés előnye a nagy pontosság és a megbízhatóság, különösen alacsony fordulatszámon. Ugyanakkor a szenzorok beépítése növeli a motor költségét és bonyolultságát, valamint a szenzorok meghibásodása a motor működésképtelenségéhez vezethet.
A szenzor nélküli vezérlés ezzel szemben nem használ külön szenzorokat a forgórész pozíciójának meghatározására. Ehelyett a vezérlő elektronika a motor tekercseiben indukálódó feszültséget (ún. „back-EMF”) figyeli. A back-EMF a forgórész sebességével arányos, és a polaritása jelzi a forgórész pozícióját. A vezérlő ez alapján végzi a kommutációt. A szenzor nélküli vezérlés olcsóbb és egyszerűbb, mivel nincs szükség szenzorokra. Viszont kevésbé pontos, különösen alacsony fordulatszámon, mivel a back-EMF ilyenkor nagyon gyenge. A szenzor nélküli vezérlés indítása is problémás lehet, mivel a motor álló helyzetében nincs back-EMF.
A BLDC motorok hatékony működésének záloga a forgórész pillanatnyi pozíciójának pontos ismerete, amelyet szenzorok vagy a back-EMF mérésével lehet elérni, lehetővé téve a tekercsek megfelelő időzítésű kapcsolását.
A két módszer közötti választás a konkrét alkalmazástól függ. A szenzoros vezérlés ideális olyan alkalmazásokhoz, ahol a pontosság és a megbízhatóság kritikus fontosságú, például robotikában vagy precíziós gépekben. A szenzor nélküli vezérlés pedig költséghatékony megoldást kínál olyan alkalmazásokhoz, ahol a pontosság kevésbé fontos, például ventilátorokban vagy szivattyúkban.
Szenzoros BLDC motor vezérlés: Hall-szenzorok alkalmazása
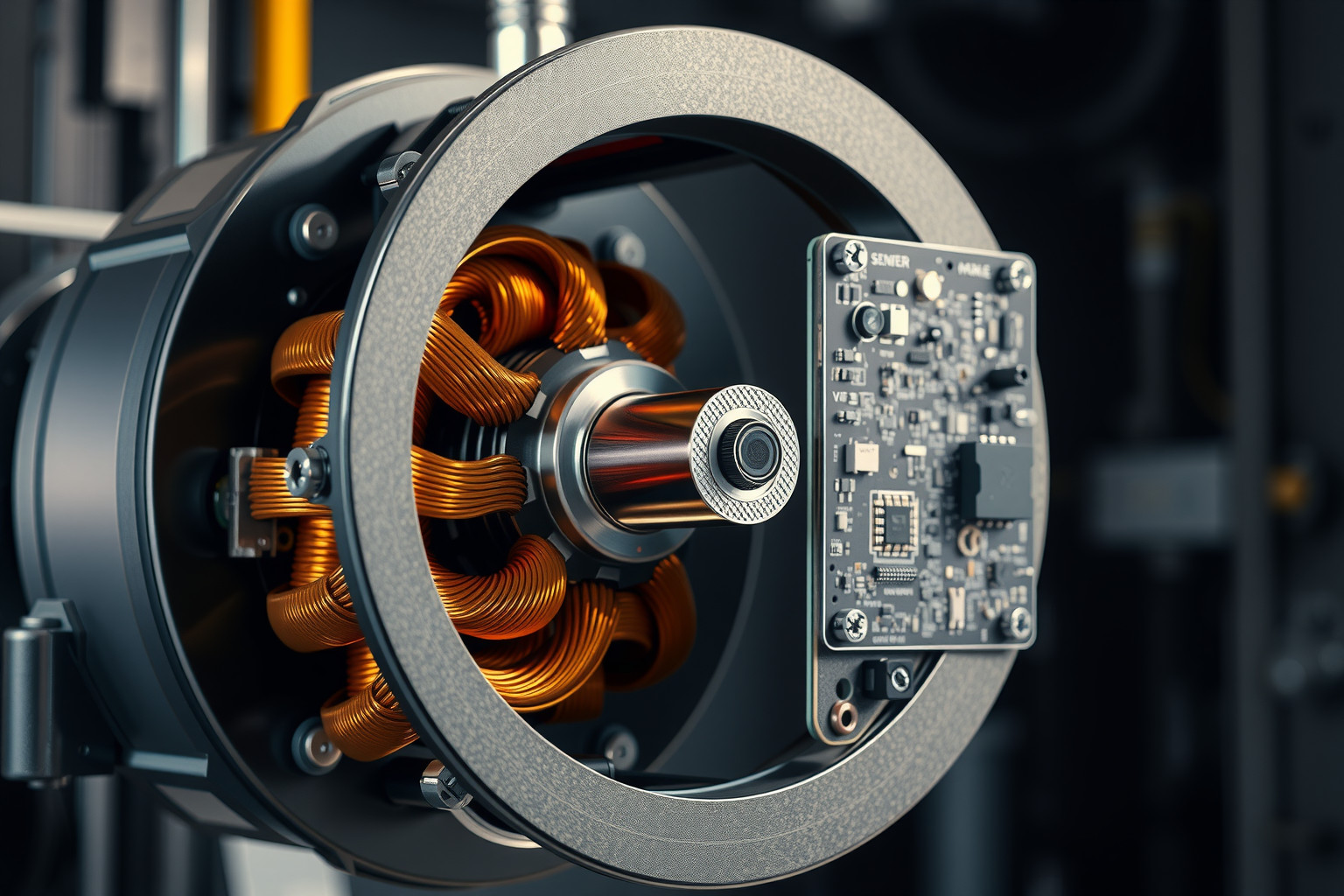
A szenzoros BLDC motorok vezérlése gyakran Hall-szenzorok segítségével történik. Ezek a szenzorok a motor állórészében, a tekercsek közelében helyezkednek el, és a forgórész mágneses terének változásait érzékelik. A Hall-szenzorok kimenete digitális jel, ami jelzi a mágneses pólusok helyzetét (északi vagy déli). Általában három Hall-szenzort alkalmaznak, amelyek 120 fokos elektromos eltolással vannak elhelyezve egymáshoz képest.
A Hall-szenzorok jelei alapján a vezérlőegység (mikrokontroller vagy dedikált meghajtó IC) meghatározza a forgórész pontos pozícióját. Ez az információ elengedhetetlen a megfelelő tekercsek bekapcsolásához a kommutáció során. A kommutáció során a tekercsek áramirányát váltogatják, hogy a forgórész állandó forgatónyomatékot kapjon.
A Hall-szenzorok által szolgáltatott pozícióinformáció közvetlenül befolyásolja a motor hatékonyságát és teljesítményét, mivel lehetővé teszi a tekercsek optimális időzítésű bekapcsolását.
A Hall-szenzoros vezérlés előnye a relatív egyszerűség és költséghatékonyság. Ugyanakkor a szenzorok jelenléte növeli a rendszer komplexitását és potenciális hibalehetőségeit. A szenzorok pontossága is befolyásolja a motor teljesítményét, ezért fontos a megfelelő szenzorok kiválasztása és kalibrálása.
Tipikus alkalmazások, ahol a Hall-szenzoros vezérlést alkalmazzák: ventilátorok, szivattyúk, elektromos kerékpárok, és egyéb olyan alkalmazások, ahol fontos a precíz vezérlés és a megbízható működés.
Szenzor nélküli BLDC motor vezérlés: Back-EMF érzékelés
A szenzor nélküli BLDC motor vezérlés egyik legelterjedtebb módszere a Back-EMF (visszaelektromotoros erő) érzékelés. Mivel a BLDC motorok mágneses pozícióérzékelők (Hall-szenzorok) nélkül működnek, valamilyen más módon kell meghatározni a forgórész helyzetét a megfelelő kommutációhoz. A Back-EMF, ami a tekercsekben indukálódik a mágneses mező és a forgórész mozgásának hatására, kulcsfontosságú információt szolgáltat erről.
A motor három fázisú tekercseléssel rendelkezik. Egy adott pillanatban csak két fázis van aktívan bekapcsolva (gerjesztve), míg a harmadik fázis „lebeg”. Ebben a lebegő fázisban indukálódik a Back-EMF. Ennek a feszültségnek a mérésével lehet következtetni a forgórész helyzetére.
A nullátmenet (zero-crossing) detektálása a Back-EMF görbében kritikus fontosságú. Ez az a pont, ahol a Back-EMF feszültség átlépi a nullát, és ez az információ használható a következő kommutációs lépés időzítésére.
A gyakorlatban a Back-EMF mérés zajos lehet, ezért különféle szűrőket és jelfeldolgozási technikákat alkalmaznak a pontosabb eredmények érdekében. Komparátorok segítségével hasonlítják össze a Back-EMF feszültséget egy referencia feszültséggel (általában a tápfeszültség fele), és az eredmény alapján generálják a kommutációs jeleket.
Fontos megjegyezni, hogy a Back-EMF érzékelés alacsony fordulatszámon kevésbé hatékony, mivel a Back-EMF feszültség alacsony, és nehezen detektálható. Ezért a szenzor nélküli BLDC motorok gyakran valamilyen más módszerrel indulnak el (pl. open-loop vezérléssel), majd átváltanak a Back-EMF alapú vezérlésre, amikor a motor elér egy bizonyos fordulatszámot.
A Back-EMF érzékelés költséghatékony megoldás a BLDC motorok vezérlésére, mivel nincs szükség külön szenzorokra. Azonban a pontossága és a megbízhatósága függ a jelfeldolgozás minőségétől és a motor működési körülményeitől.
A BLDC motor vezérlő áramköre: Inverter topológiák
A BLDC motorok hatékony vezérlésének kulcseleme az inverter, ami a DC feszültséget a motor tekercseinek megfelelő AC feszültséggé alakítja. A legelterjedtebb inverter topológia a háromfázisú híd inverter, ami hat kapcsolóból (jellemzően MOSFET-ekből vagy IGBT-kből) áll. Ezek a kapcsolók vezérlőjelekkel nyithatók és zárhatók, lehetővé téve a tekercsek áramának irányítását és a forgó mágneses tér létrehozását.
Az inverter kapcsolóinak vezérlése történhet szinuszos PWM (Pulse Width Modulation), vagy trapéz alakú kommutációval. A szinuszos PWM simább áramot biztosít, csökkentve a nyomatékhullámzást, míg a trapéz kommutáció egyszerűbb vezérlést tesz lehetővé.
A háromfázisú híd inverter a leggyakrabban használt topológia a BLDC motorok vezérlésére, mivel jó hatásfokot és egyszerű vezérlést biztosít.
Léteznek más inverter topológiák is, mint például a single-switch forward konverter, amely alacsonyabb teljesítményű alkalmazásokhoz alkalmas, vagy a háromszintű inverter, ami kisebb harmonikus torzítást eredményez nagyobb teljesítményű rendszerekben. A megfelelő inverter topológia kiválasztása a motor teljesítményétől, a kívánt hatásfoktól és a vezérlés komplexitásától függ.
A BLDC motor vezérlő algoritmusai: PWM és FOC
A BLDC motorok hatékony vezérlése kulcsfontosságú a teljesítményük maximalizálásához. Két elterjedt vezérlési algoritmus a PWM (Pulse Width Modulation, impulzusszélesség-moduláció) és a FOC (Field-Oriented Control, térvektoros vezérlés). A PWM egy egyszerűbb módszer, ami az egyes tekercsekre jutó feszültséget szabályozza az impulzusok szélességének változtatásával. Minél szélesebb az impulzus, annál nagyobb a feszültség, és ezáltal a motorba jutó áram is. Ez a módszer viszonylag könnyen implementálható, de kevésbé hatékony a FOC-hoz képest.
A FOC egy sokkal kifinomultabb vezérlési technika, amely a motor mágneses terét irányítja. Ahelyett, hogy közvetlenül a tekercsek feszültségét szabályozná, a FOC a motorban folyó áramot dekomponálja két ortogonális komponensre: a nyomaték-generáló áramra (iq) és a mágneses fluxus áramra (id). Ezt a két áramkomponenst külön-külön szabályozva a motor nyomatéka és sebessége precízen vezérelhető.
A FOC lehetővé teszi a BLDC motor optimális hatásfokkal és dinamikus teljesítménnyel történő működtetését, különösen változó terhelési viszonyok között.
A FOC implementációja bonyolultabb, mivel trigonometrikus transzformációkat (Clark és Park transzformációkat) és PID szabályozókat használ a kívánt áramok eléréséhez. Azonban a magasabb költségek és a nagyobb számítási igény ellenére a FOC a választott módszer a nagy teljesítményű alkalmazásokban, ahol a precizitás és a hatékonyság kritikus fontosságú.
A PWM gyakran használatos egyszerűbb, költséghatékony alkalmazásokban, mint például ventilátorok vagy kis teljesítményű szivattyúk. Ezzel szemben a FOC előnyei jobban érvényesülnek olyan alkalmazásokban, mint a robotika, az elektromos járművek és a CNC gépek, ahol a pontos pozícionálás és a dinamikus nyomatékszabályozás elengedhetetlen.
A BLDC motor előnyei a hagyományos motorokkal szemben
A BLDC motorok számos előnnyel rendelkeznek a hagyományos, kefés DC motorokkal szemben. Elsősorban a kefék hiánya miatt sokkal megbízhatóbbak és hosszabb élettartamúak. A kefés motoroknál a kefék kopása gyakori probléma, ami csökkenti a motor hatékonyságát és élettartamát. Ezzel szemben a BLDC motoroknál nincs mechanikai érintkezés, így ez a probléma megszűnik.
Továbbá, a BLDC motorok jobb hatásfokkal működnek. A kefék súrlódása a kefés motoroknál jelentős energiaveszteséget okoz, míg a BLDC motoroknál ez a veszteség minimalizálódik. Ezáltal a BLDC motorok kevesebb energiát fogyasztanak ugyanazon teljesítmény eléréséhez.
A BLDC motorok egyik legfontosabb előnye a pontosabb vezérlés. Az elektronikus kommutáció lehetővé teszi a fordulatszám és a nyomaték pontos szabályozását, ami különösen fontos a precíziós alkalmazásokban.
Emellett a BLDC motorok kisebb zajt bocsátanak ki működés közben, mivel nincsenek a kefék okozta szikrázások és mechanikai zajok. Végül, a BLDC motorok gyakran kisebbek és könnyebbek is, mint a hasonló teljesítményű kefés motorok, ami előnyös a helytakarékos alkalmazásokban.
A BLDC motor hátrányai és korlátai
A BLDC motorok számos előnnyel rendelkeznek, de nem mentesek a hátrányoktól. Az egyik legfontosabb korlát a bonyolult vezérlési elektronika szükségessége. Ez jelentősen növeli a motor rendszerének költségét, különösen a szenzoros változatoknál, ahol a rotor helyzetét folyamatosan figyelni kell. A szenzor nélküli vezérlés bonyolultabb algoritmusokat igényel, ami a fejlesztési időt és a költségeket is emeli.
További hátrány a magasabb gyártási költség a hagyományos DC motorokhoz képest. A precíz tekercselés és a mágnesek minősége befolyásolja az árat. Az indukált feszültség (back EMF) hatása is kihívást jelenthet bizonyos alkalmazásokban, különösen alacsony sebességnél, amikor a helyzetérzékelés pontossága csökkenhet.
A BLDC motorok legfőbb korlátja a vezérlés komplexitása és a magasabb költség, ami korlátozhatja alkalmazásukat költségérzékeny területeken.
Végül, a zajszint is lehet probléma bizonyos alkalmazásokban. Bár a BLDC motorok általában csendesebbek a szénkefés motoroknál, a kapcsoló elektronika zajt generálhat, különösen magas frekvencián működve. Ezt a zajt szűrőkkel és megfelelő árnyékolással lehet csökkenteni, ami további költségeket jelent.
A BLDC motor alkalmazásai: Háztartási gépek
A BLDC motorok elterjedése a háztartási gépekben a hatékonyságuknak és hosszú élettartamuknak köszönhető. Számos alkalmazási területen felváltották a hagyományos, kefés motorokat.
Porszívókban a BLDC motorok erőteljes szívóteljesítményt biztosítanak, miközben kevesebb energiát fogyasztanak. Mosógépekben a precíz fordulatszám-szabályozásuk lehetővé teszi a ruhák kíméletes, mégis hatékony tisztítását. A zajszintjük is alacsonyabb, ami csendesebb működést eredményez.
Hűtőszekrényekben a kompresszorok hajtásához használt BLDC motorok változó sebességű működést tesznek lehetővé, aminek köszönhetően a hűtés hatékonyabban szabályozható, és az energiafogyasztás jelentősen csökken.
A BLDC motorok használata a háztartási gépekben jelentősen hozzájárul az energiahatékonysághoz és a készülékek élettartamának növeléséhez.
Számos egyéb készülékben is megtalálhatók, például szárítógépekben, konyhai robotgépekben és ventilátorokban, ahol a megbízhatóság és az alacsony karbantartási igény kiemelten fontos.
A BLDC motor alkalmazásai: Elektromos járművek

Az elektromos járművek (EV-k) forradalmasítják a közlekedést, és ebben a forradalomban a BLDC motorok kulcsszerepet játszanak. A BLDC, azaz kefe nélküli egyenáramú motorok kiemelkedő hatékonyságuk, megbízhatóságuk és hosszú élettartamuk miatt ideálisak az elektromos autók, motorok és robogók hajtására.
A hagyományos belsőégésű motorokkal szemben a BLDC motorok sokkal kevesebb energiát pazarolnak el hő formájában. Ez azt jelenti, hogy az akkumulátor energiájának nagyobb része fordítható a jármű mozgatására, ami nagyobb hatótávolságot eredményez. Ezen felül, a BLDC motorok kisebb méretűek és könnyebbek is lehetnek, ami tovább javítja a járművek hatékonyságát és kezelhetőségét.
A BLDC motorok vezérlése elektronikus úton történik, ami lehetővé teszi a precíz nyomatékszabályozást és a gyors reakcióidőt. Ez a járművezetők számára jobb vezetési élményt, simább gyorsulást és hatékonyabb fékezést tesz lehetővé. A regeneratív fékezés, amely visszatáplálja a mozgási energiát az akkumulátorba, szintén könnyebben megvalósítható BLDC motorokkal.
Az elektromos járművekben a BLDC motorok nem csak a hajtásláncban játszanak fontos szerepet. Alkalmazzák őket a különböző segédberendezések, például a szervokormány, a légkondicionáló és a hűtőrendszer meghajtására is. Ezekben az alkalmazásokban is a BLDC motorok hatékonysága és megbízhatósága előnyös.
A BLDC motorok elterjedése az elektromos járművekben nem csak a hatékonyság és a teljesítmény javítását szolgálja, hanem hozzájárul a környezetvédelmi célok eléréséhez is, csökkentve a károsanyag-kibocsátást és a zajszennyezést.
A BLDC motorok folyamatos fejlesztése és az akkumulátor technológia fejlődése együttesen teszi lehetővé az elektromos járművek szélesebb körű elterjedését és a fenntartható közlekedés jövőjét.
A BLDC motor alkalmazásai: Ipari automatizálás
A BLDC motorok az ipari automatizálás területén elengedhetetlenek a pontosságuk, hatékonyságuk és megbízhatóságuk miatt. Számos alkalmazásban felváltották a hagyományos kefés DC motorokat, elsősorban a hosszabb élettartamuk és a kisebb karbantartási igényük miatt.
Az ipari robotok mozgatásában kulcsszerepet játszanak. A precíz pozícionálás és a nagy nyomaték lehetővé teszi a robotkarok számára a komplex feladatok elvégzését, mint például a szerelés, hegesztés vagy a csomagolás. A szervo rendszerek, melyek a BLDC motorokra épülnek, gyors és pontos válaszokat adnak a vezérlési jelekre, ami elengedhetetlen a modern gyártósorokon.
Szállítószalagokban is gyakran alkalmazzák őket. A BLDC motorok változtatható sebességű hajtásai (VSD) lehetővé teszik a szállítószalag sebességének pontos szabályozását, optimalizálva a termelést és csökkentve az energiafogyasztást.
A BLDC motorok alkalmazása az ipari automatizálásban jelentősen növeli a termelékenységet, csökkenti az állásidőt és javítja a termékek minőségét.
Végül, de nem utolsósorban, a CNC gépekben is nélkülözhetetlenek. A nagy sebességű, pontos mozgások eléréséhez a BLDC motorok ideális választást jelentenek, biztosítva a precíz alkatrészgyártást.
A BLDC motor alkalmazásai: Drónok és robotika
A BLDC motorok forradalmasították a drónok és a robotika világát. A magas hatásfokuk és a kicsi méretük lehetővé teszi a hosszabb repülési időt a drónok számára, miközben a robotok mozgékonyságát és pontosságát is növelik.
A drónokban a BLDC motorok közvetlenül a légcsavarokat hajtják meg, így biztosítva a fel- és leszállást, valamint a manőverezést. A motorok precíz vezérlése kulcsfontosságú a stabil repüléshez és a pontos navigációhoz. A robotok esetében a BLDC motorok az ízületek mozgatásáért felelnek, lehetővé téve a komplex feladatok végrehajtását.
Számos robotikai alkalmazásban, például ipari robotkarokban, a BLDC motorok a nagy nyomatékuk és a hosszú élettartamuk miatt ideális választásnak bizonyulnak. Emellett a karbantartásigényük is alacsonyabb a hagyományos motorokhoz képest.
A BLDC motorok elengedhetetlenek a modern drónok és robotok számára, mivel lehetővé teszik a precíz mozgást, a nagy hatékonyságot és a megbízható működést.
A jövőben a BLDC motorok további fejlesztései még szélesebb körű alkalmazásokat tesznek lehetővé ezen a területen, például autonóm robotok és fejlett drónszolgáltatások formájában.
A BLDC motor alkalmazásai: Orvosi eszközök
A BLDC motorok precizitása, megbízhatósága és kompakt mérete ideálissá teszi őket számos orvosi eszközben való alkalmazásra. A sebészeti robotok mozgásának finomhangolásához elengedhetetlenek, lehetővé téve a minimálisan invazív beavatkozásokat.
A vérpumpákban a BLDC motorok biztosítják a folyamatos és szabályozott véráramlást, ami kritikus fontosságú a szív- és érrendszeri beavatkozások során. A fogászati fúrók esetében a magas fordulatszám és a pontos vezérlés elengedhetetlen a hatékony és biztonságos munkavégzéshez, amit szintén a BLDC motorok tesznek lehetővé.
A lélegeztetőgépek működésében a BLDC motorok felelősek a levegő pontos adagolásáért, ami életmentő lehet a légzési problémákkal küzdő betegek számára.
A BLDC motorok használata az orvosi eszközökben lehetővé teszi a nagyobb pontosságot, a kisebb zajszintet és a hosszabb élettartamot, ami közvetlenül javítja a betegek kezelésének minőségét.
Továbbá, a diagnosztikai eszközök, mint például a CT és MRI szkennerek, szintén profitálnak a BLDC motorok által nyújtott precíz mozgásvezérlésből, ami élesebb és részletesebb képeket eredményez.



















{kind=link}